Quanterion recently completed its agent-based Unmanned Aerial System (UAS) control assessment by performing a successful static demonstration of UAS autopilot control via a Virtual Cockpit. Using the Tactical AgentFly system, the project was able to demonstrate the command and control of multiple Hardware in the Loop (HIL) UAVs, as well as the interaction and airspace deconfliction of simulated UAVs and HIL UAVs in mixed-reality simulation. Future efforts will integrate the demonstrated capabilities of the developed software into UASs for live flight testing. This effort was completed under Quanterion’s operation of the Cyber Security and Information Systems Information Analysis Center (CSIAC).
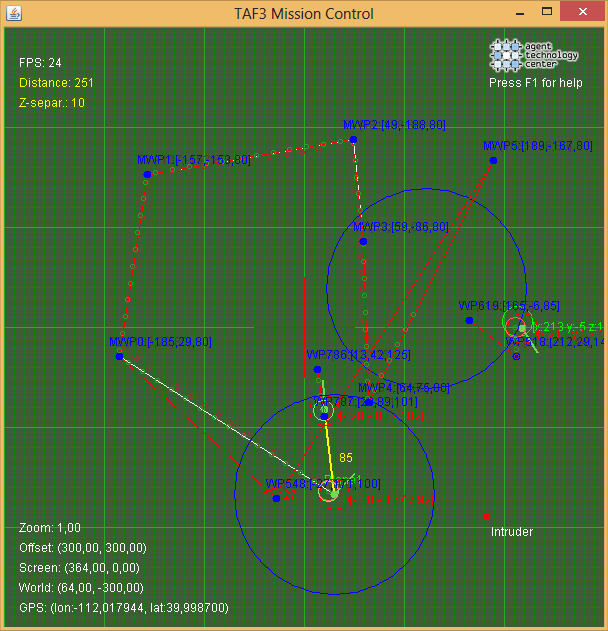
AgentFly ground station visualization window
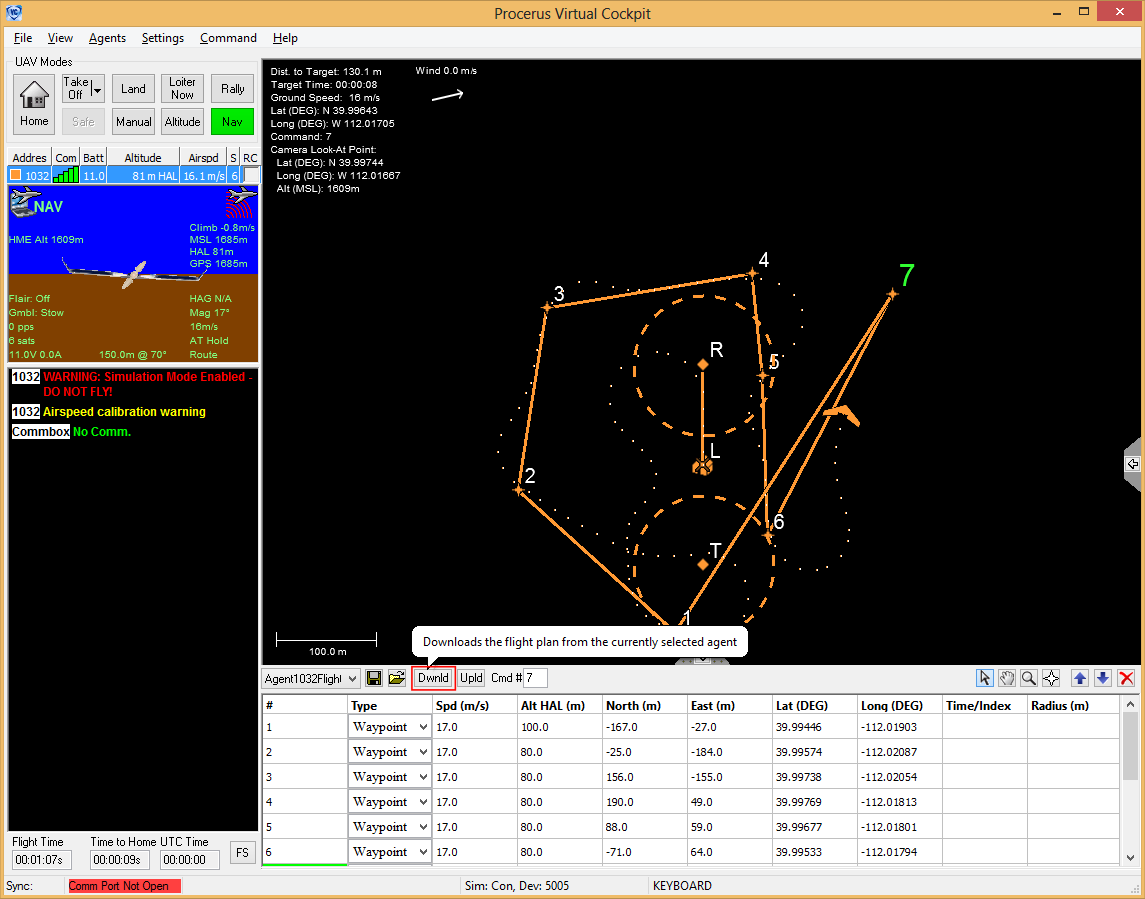
Waypoint download from Kestrel autopilot in Virtual Cockpit
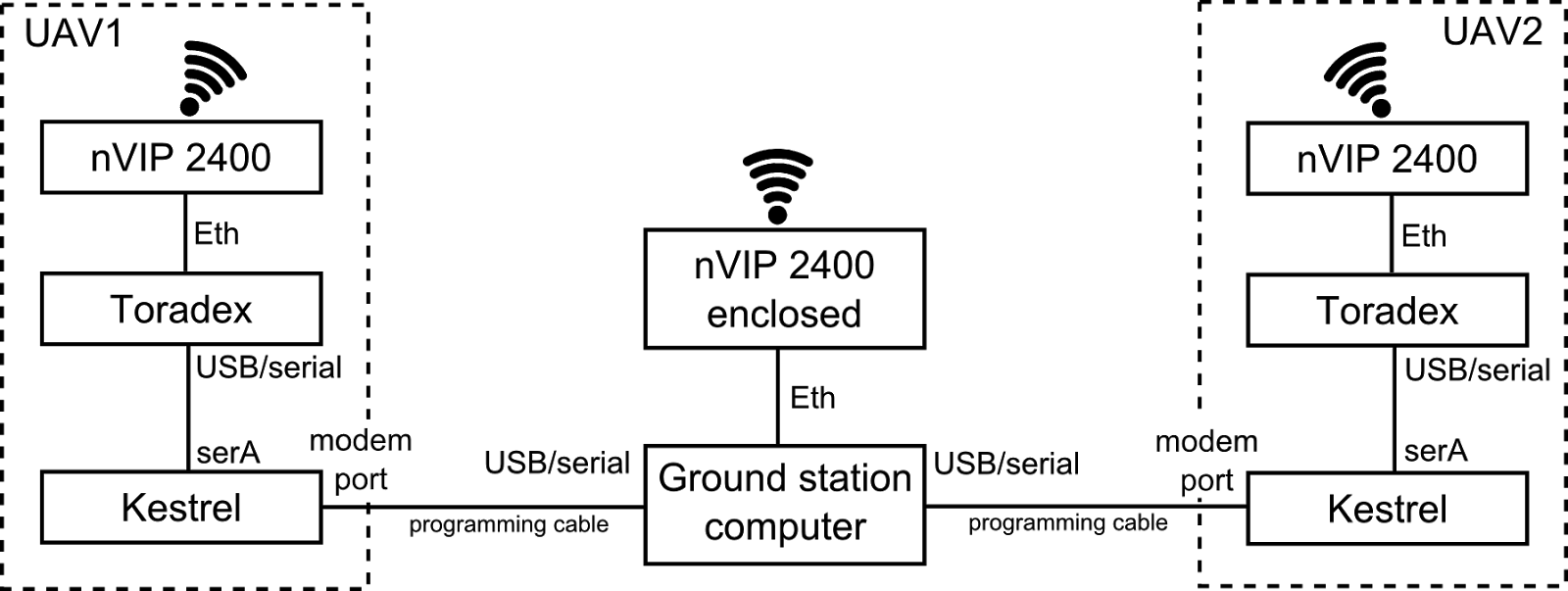
Scheme of the connection of two hardware UAVs in HIL mode